2. Buat program untuk mikrokontroler STM32F103C8 di software STM32 CubeIDE.
3. Build program yang telah dibuat, lalu inputkan program ke dalam mikrokontroler melalui stlink.
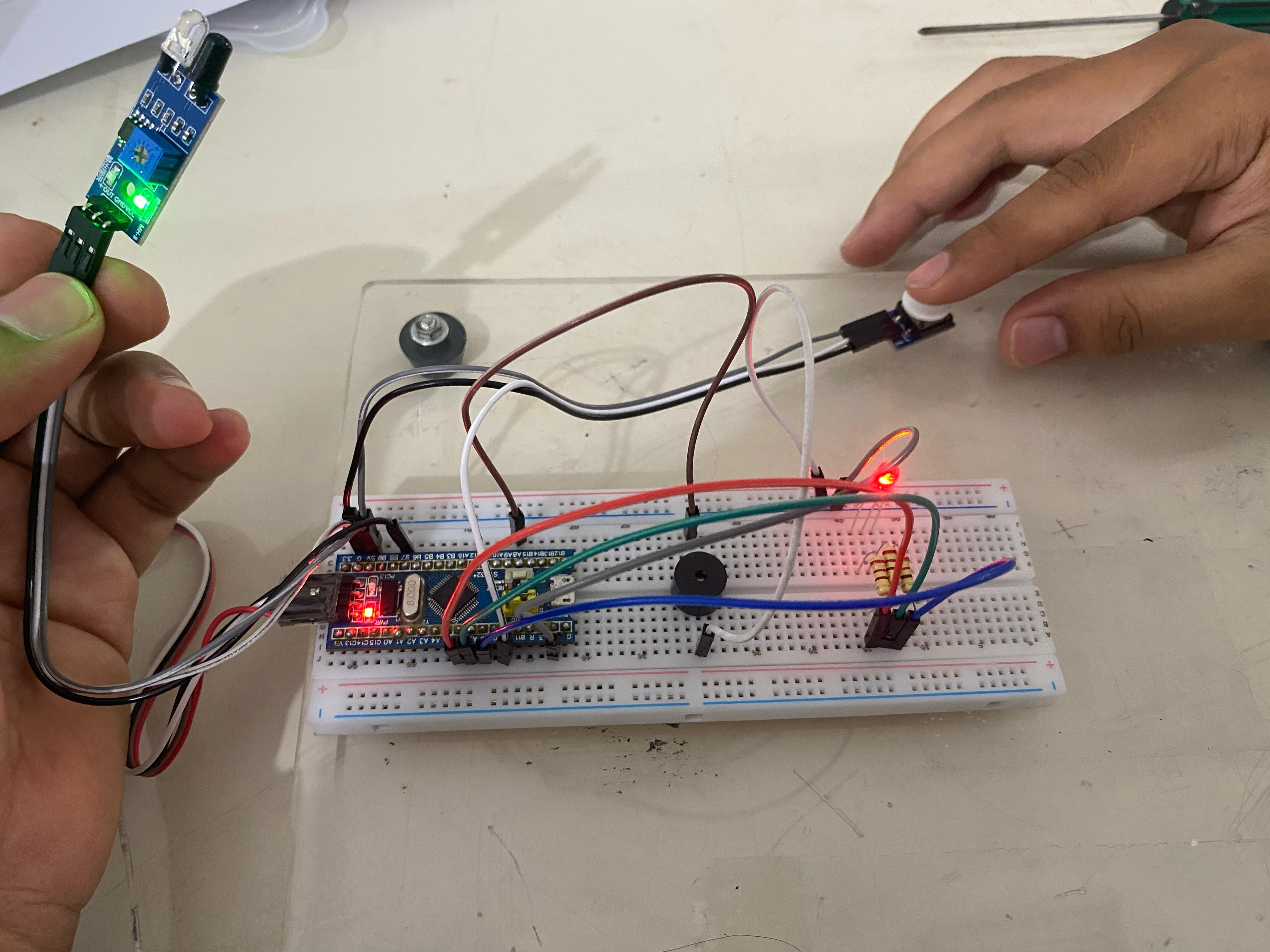
4. Setelah program diinputkan, uji rangkaian yang telah dirangkai sesuai dengan output yang ditentukan.










Ketika konfigurasinya telah selesai, save project dan kemudian akan ditampilkan halaman pemrograman. Disini sudah langsung tersedia beberapa program karena konfigurasi yang telah dilakukan sebelumnya. Untuk pemrogramannya dimulai dari #include “main.h” yang merupakan fungsi utamanya. Yang perlu ditambahkan disini adalah codingan pada bagian loopnya, yang terletak di dalam kurung kurawal pada bagian while. Program ini menunjukkan dimana pada kondisi awal, seluruh outputnya dalam keadaan reset atau tidak aktif. Disini digunakan fungsi if yang mana jika sensor infrared dalam keadaan set, maka outputnya adalah mengaktifkan RGB LED berwarna merah dan juga mengaktifkan buzzer. Kemudian jika push buttonnya ditekan atau dalam keadaan set, maka outputnya adalah mengaktifkan RGB LED berwarna hijau dan juga mengaktifkan buzzer.
Setelah programnya selesai, dilanjutkan dengan build program tersebut dan diinputkan ke mikrokontroler melalui stlink. Setelah programnya diinputkan, dapat dilakukan uji coba pada rangkaiannya, yang mana ketika dijalankan, kondisi awal adalah ketika sensor infrared tidak mendeteksi gerakan dan push button tidak ditekan, maka outputnya adalah RGB LED dan buzzernya tidak aktif. Ketika sensor infrared mendeteksi gerakan, maka outputnya adalah mengaktifkan RGB LED berwarna merah dan juga mengaktifkan buzzer, sedangkan jika push buttonnya ditekan, maka outputnya adalah mengaktifkan RGB LED berwarna hijau dan juga mengaktifkan buzzer. Kemudian apabila sensor infrared mendeteksi gerakan serta push buttonnya ditekan, maka output yang ditampilkan adalah RGB LED yang berwarna jingga akibat perpaduan warna merah dan hijau serta buzzernya akan aktif.

#include "main.h"
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
while (1)
{
uint8_t button_status = HAL_GPIO_ReadPin(GPIOB, BUTTON_Pin);
uint8_t ir_status = HAL_GPIO_ReadPin(GPIOB, IR_Pin);
HAL_GPIO_WritePin(GPIOA, GREEN_Pin | RED_Pin | BUZZER_Pin, GPIO_PIN_RESET);
if (button_status == GPIO_PIN_SET)
{
HAL_GPIO_WritePin(GPIOA, RED_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, BUZZER_Pin, GPIO_PIN_SET);
}
if (ir_status == GPIO_PIN_SET)
{
HAL_GPIO_WritePin(GPIOA, GREEN_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, BUZZER_Pin, GPIO_PIN_SET);
}
HAL_Delay(100);
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK |
RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
HAL_GPIO_WritePin(GPIOA, RED_Pin | GREEN_Pin | BUZZER_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(BLUE_GPIO_Port, BLUE_Pin, GPIO_PIN_RESET);
GPIO_InitStruct.Pin = RED_Pin | GREEN_Pin | BUZZER_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = BLUE_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(BLUE_GPIO_Port, &GPIO_InitStruct);
GPIO_InitStruct.Pin = BUTTON_Pin | IR_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif






Tidak ada komentar:
Posting Komentar