Di mulai dari pengertiannya. Baterai merupakan sebuah benda yang dapat
atau bisa mengubah energi kimia menjadi energi listrik. Energi listrik
yang dihasilkan oleh baterai tersebut sama seperti accumulator, yakni
listrik searah dikatakan DC. Jumlah listrik yang dihasilkan tersebut
tergantung dari seberapa besar baterai tersebut.
Baterai
Fungsi Baterai:
Sangat beragam fungsi dari baterai dalam kehidupan sehari-hari namun
memiliki intinya yang sama yakni sebagai sumber energi, karena hampir
pada semua alat elektronik yang sifatnya mobile juga perlu baterai
sebagai sumber energi. Sebut misalnya seperti HP, senter, power bank,
drone, remote TV dan AC, dan lain sebagainya. Semua alat-alat tersebut
membutuhkan baterai agar bisa bekerja.
Spesifikasi :
Pinout :
Grafik :
Komponen
1. RESISTOR
Resistor
Resistor
adalah komponen Elektronika Pasif yang memiliki nilai resistansi atau
hambatan tertentu yang berfungsi untuk membatasi dan mengatur arus
listrik dalam suatu rangkaian Elektronika.
Rumus hukum ohm (V=IR)
2. DIODA
Fungsi Utama dari dioda adalah penyarah arus.
Spesifikasi :
3. TRANSISTOR
Transistor
merupakan salah satu Komponen Elektronika Aktif yang paling sering
digunakan dalam rangkaian Elektronika, baik rangkaian Elektronika yang
paling sederhana maupun rangkaian Elektronika yang rumit dan kompleks.
Transistor pada umumnya terbuat dari bahan semikonduktor seperti
Germanium, Silikon, dan Gallium Arsenide.
Transistor NPN
4. OP AMP
Op-Amp (Operational Amplifier) adalah salah satu bentuk IC Linear yang berfungsi sebagai Penguat Sinyal Listrik. Sebuah Op-Amp terdiri dari beberapa Transistor, Dioda, Resistor dan kapasitor yang terinterkoneksi dan terintegrasi. Sehingga memungkinkannya untuk menghasilkan Gain (penguatan) yang tinggi pada rentang frekuensi yang luas.
Op-Amp
Spesifikasi :
Pinout :
5. KOMPONEN INPUT
Sensor Ir Proximity
Sensor infrared yang dapat mendeteksi Halangan, warna dan juga gerakan
Grafik Sensor IR Proximity
Spesifikasi
Catu daya: 3.3V
Jarak deteksi: 10-20cm
Active High Digital Output (+5V)
Ambient Light & RGB Color Sensing
Proximity Sensing
Gesture Detection
Sensor Pir
Sensor PIR atau Passive Infra Red adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari suatu objek.
Grafik Sensor PIR
Grafik Sensor PIR
Konfigurasi
Gambar berikut menunjukkan bagian-bagian dari sensor PIR yang perlu untuk diketahui
Spesifikasi
Pengatur Waktu Jeda : Digunakan untuk mengatur lama pulsa high setelah terdeteksi terjadi gerakan dan gerakan telah berakhir. *
Pengatur Sensitivitas : Pengatur tingkat sensitivitas sensor PIR *
Regulator 3VDC : Penstabil tegangan menjadi 3V DC
Dioda Pengaman : Mengamankan sensor jika terjadi salah pengkabelan VCC dengan GND
DC Power : Input tegangan dengan range (3 – 12) VDC (di rekomendasikan menggunakan input 5VDC).
Output Digital : Output digital sensor
Ground : Hubungkan dengan ground (GND)
BISS0001 : IC Sensor PIR
Pengatur Jumper : Untuk mengatur output dari pin digital.
Sensor Infrared
Mendeteksi panas dan juga pergerakan
Grafik responsi sensor :
Sensor Touch
Mendeteksi Sentuhan dan merubahnya menjadi energi listrik.
Grafik responsi sensor :
Pinout :
SPESIFIKASI :
Konsumsi daya yang rendah
Bisa menerima tegangan dari 2 ~ 5.5V DC
Dapat menggantikan fungsi saklar tradisional
Dilengkapi 4 lobang baut untuk memudahkan pemasangan
Tegangan kerja : 2v s/d 5.5v (optimal 3V)
Output high VOH : 0.8 VCC (typical)
Output low VOL : 0.3 VCC (max)
Arus Output Pin Sink (@ VCC 3V, VOL 0.6V) : 8 mA
Arus Output pin pull-up (@ VCC=3V, VOH=2.4V) : 4 mA
Waktu respon (low power mode): max 220 ms
Waktu respon (touch mode): max 60 ms
Ukuran: 24 mm x 24 mm x 7.2 m
Logicstate
Gerbang
Logika (Logic Gates) adalah sebuah entitas untuk melakukan pengolahan
input-input yang berupa bilangan biner (hanya terdapat 2 kode bilangan
biner yaitu, angka 1 dan 0) dengan menggunakan Teori Matematika Boolean
sehingga dihasilkan sebuah sinyal output yang dapat digunakan untuk
proses berikutnya.
6. KOMPONEN OUTPUT
LED
Komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju.
LED Red
Pinout
Tegangan LED menurut warna yang dihasilkan:
Infra merah : 1,6 V.
Merah : 1,8 V – 2,1 V.
Oranye : 2,2 V.
Kuning : 2,4 V.
Hijau : 2,6 V.
Biru : 3,0 V – 3,5 V.
Putih : 3,0 – 3,6 V.
Ultraviolet : 3,5 V.
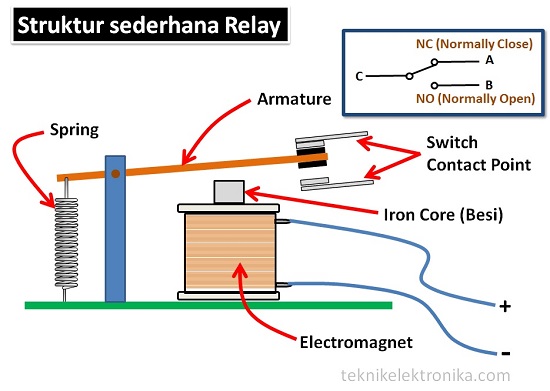
RELAY
Relay
adalah komponen elektronika yang berupa sakelar atau switch elektrik
yang dioperasikan menggunakan listrik. Relay disebut sebagai komponen
electromechanical karena terdiri dari dua bagian
Spesifikasi
Konfigurasi Pin
MOTOR DC
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion).
Resistor adalah
komponen elektronika yang berfungsi untuk menghambat atau membatasi
aliran listrik yang mengalir dalam suatu rangkain elektronika.
Sebagaimana fungsi resistor yang
sesuai namanya bersifat resistif dan termasuk salah satu komponen
elektronika dalam kategori komponen pasif. Satuan atau nilai resistansi
suatu resistor di
sebut Ohm dan dilambangkan dengan simbol Omega (Ω). Sesuai hukum Ohm
bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir
melaluinya. Selain nilai resistansinya (Ohm) resistor juga
memiliki nilai yang lain seperti nilai toleransi dan kapasitas daya
yang mampu dilewatkannya. Semua nilai yang berkaitan dengan resistor
tersebut penting untuk diketahui dalam perancangan suatu rangkaian elektronika oleh karena itu pabrikan resistor selalu mencantumkan dalam kemasan resistor tersebut.
Simbol Resistor Sebagai Berikut :
Resistor
dalam suatu teori dan penulisan formula yang berhubungan dengan
resistor disimbolkan dengan huruf “R”. Kemudian pada desain skema
elektronika resistor tetap disimbolkan dengan huruf “R”, resistor
variabel disimbolkan dengan huruf “VR” dan untuk resistorjenis
potensiometer ada yang disimbolkan dengan huruf “VR” dan “POT”.
Nilai
resistor dapat diketahui dengan kode warna dan kode huruf pada
resistor. Resistor dengan nilai resistansi ditentukan dengan kode warna
dapat ditemukan pada resistor tetap dengan kapasitas daya rendah,
sedangkan nilai resistor yang ditentukan dengan kode huruf dapat ditemui
pada resistor tetap daaya besar dan resistor variable.
Cicin
warna yang terdapat pada resistor terdiri dari 4 ring 5 dan 6 ring
warna. Dari cicin warna yang terdapat dari suatu resistor tersebut
memiliki arti dan nilai dimana nilai resistansi resistor dengan kode
warna yaitu :
1. Masukkan angka langsung dari kode warna gelang pertama
2. Masukkan angka langsung dari kode warna gelang kedua
3. Masukkan angka langsung dari kode warna gelang ketiga
4. Masukkan jumlah nol dari warna gelang ke-4 atau pangkatkan angka tersebut dengan (10^n), merupakan nilai toleransi dari resistor.
Resistor
dengan kode huruf dapat kita baca nilai resistansinya dengan mudah
karenanilia resistansi dituliskan secara langsung. Pad umumnya resistor
yang dituliskan dengan kode huruf memiliki urutan penulisan kapasitas
daya, nilai resistansi dan toleransi resistor. Kode huruf digunakan
untuk penulisan nilai resistansi dan toleransi resistor.
Kode Huruf Untuk Nilai Resistansi :
R, berarti x1 (Ohm)
K, berarti x1000 (KOhm)
M, berarti x 1000000 (MOhm)
Kode Huruf Untuk Nilai Toleransi :
F, untuk toleransi 1%
G, untuk toleransi 2%
J, untuk toleransi 5%
K, untuk toleransi 10%
M, untuk toleransi 20%
Rumus Resistor
Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di
antara kedua pin dimana nilai tegangan terhadap resistansi tersebut
berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum
OHM :
Dimana V adalah tegangan, I adalah kuat arus, dan R adalah Hambatan
Mencari resistansi total dalam rangkaian dapat menggunakan :
Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana : Rtotal = Total Nilai Resistor R1 = Resistor ke-1 R2 = Resistor ke-2 R3 = Resistor ke-3 Rn = Resistor ke-n
Dimana : Rtotal = Total Nilai Resistor R1 = Resistor ke-1 R2 = Resistor ke-2 R3 = Resistor ke-3 Rn = Resistor ke-n
Dioda
Dioda
atau disebut juga sinyal dioda adalah komponen dasar semikonduktor
aktif yang hanya bisa mengalirkan arus satu arah saja (forward bias)
yaitu dari arah positip (Anoda) ke arah negatif (Katoda) namun memblok
arus untuk arah sebaliknya. Dalam rangkaian elektronika dioda
diibaratkan sebagai kran/katup listrik satu arah. Dioda memiliki dua
elektroda yaitu elektroda positip (Anoda) dan elektroda negatif
(Katoda). Secara umum dioda biasa dipakai untuk merubah arus bolak-balik
(AC) menjadi arus searah (DC) atau disebut sebagai Rectifier.
Dioda dibuat dari bahan semikonduktor seperti germanium (Ge), Silicon
(Si) dan galium arsenide (GaAs), sifat listrik pada jenis material
tersebut ialah menengah atau dengan kata lain tidak baik sebagai
konduktor dan tidak baik juga sebagai insulator, sifat ini dinamakan
semikonduktor.
Jenis dan Simbol Dioda
Seperti
penjelasan diatas, Jenis dioda tergantung dari bahan material yang
dipakai saat pembuatannya, dibawah ini adalah contoh gambar dan simbol
dari jenis-jenis dioda:
1. Dioda Silicon
Terbuat dari bahan Germanium, memiliki drop tegangan maju (forward
volt drop) 0,7V, pada rangkaian elektronika biasa dipakai sebagai
penyearah (rectifier). Contoh dioda Germanium adalah: 1N4000 series dan
1N5000 series dll.
2. Dioda Germanium
Terbuat dari bahan Silicon, memiliki drop tegangan maju (forward volt
drop) 0,3V. Biasa diaplikasikan sebagai dioda penyearah. contoh dioda
silicon adalah: IN4148 atau 1N914 dll.
3. Dioda Zener
Terbuat dari bahan silikon, dioda zener atau sering disebut juga
"breakdown diode" berfungsi sebagai pembatas tegangan pada rangkaian,
atau dengan kata lain dioda zener adalah komponen regulator tegangan
sederhana. dioda zener memiliki rating tegangan antara 1 sampai ratusan
volt dengan daya mulai dari 1/4w.
4. Light Emitting Diode atau LED
Adalah jenis dioda yang dapat mengeluarkan cahaya, LED yang banyak
dipasaran berbentuk kubah bulat dan juga kotak persegi dengan variasi
warna merah, kuning, hijau, biru atau putih. batas arus maksimum LED
adalah 20mA. dan memiliki drop tegangan maju (forward volt drop) antara
1,2v sampai 3,6v tergantung dari jenis warna LED.
5. Dioda Schottky
disebut juga dioda power memiliki drop tegangan maju (forward bias)
yang rendah, namun rating arus dan tegangannya tinggi. Biasa dipakai
sebagai penyearah pada frekuensi tinggi, sering dipakai pada rangkaian
pengisian battre, AC Rectifier dan Inverter.contoh untuk dioda schotky
adalah 5819 atau 58xx dll.
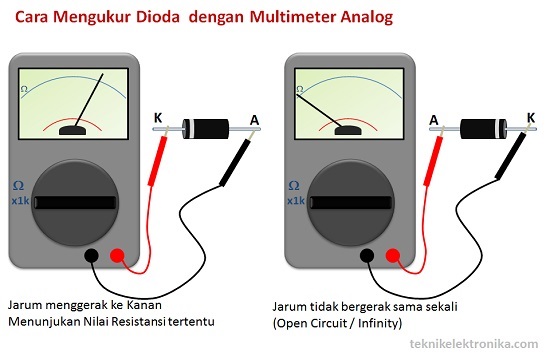
Cara Mengukur Dioda dengan Multimeter Analog
Aturkan Posisi Saklar pada Posisi OHM (Ω) x1k atau x100
Hubungkan Probe Merah pada Terminal Katoda (tanda gelang)
Hubungkan Probe Hitam pada Terminal Anoda.
Baca hasil Pengukuran di Display Multimeter
Jarum pada Display Multimeter harus bergerak ke kanan
Balikan Probe Merah ke Terminal Anoda dan Probe Hitam pada Terminal Katoda (tanda gelang).
Baca hasil Pengukuran di Display Multimeter
Jarum harus tidak bergerak. **Jika Jarum bergerak, maka Dioda tersebut berkemungkinan sudah rusak.
Rumus Dioda zener
Transistor
Transistor NPN Fungsi-fungsi Transistor diantaranya adalah :
sebagai Penyearah,
sebagai Penguat tegangan dan daya,
sebagai Stabilisasi tegangan,
sebagai Mixer,
sebagai Osilator
sebagai Switch (Pemutus dan Penyambung Sirkuit)
Lambang Transistor BJT
Sudah
jelas seperti gambar di atas bahwa transistor PNP memiliki simbol yang
arah panahnya masuk dan sebaliknya untuk NPN arah panah dari emiter
mengarah keluar.
Bentuk
aliran arus pada sebuah transistor dapat dirumuskan dengan hukum KCL (
Kirchoff Current Law) Atau hukum Kirchoff I, yang dirumuskan sebagai
berikut.
Pada Transistor BJT nilai arus Ib relatif sangat kecil terhadap Ic, maka Ib ini dapat diabaikan. Sehingga persamaan diatas bisa berubah menjadi
Ie = Ic
Keterangan : Ie = Arus Emitter Ic = Arus Collector
Rumus lain transistor NPN:
Karakteristik I/O
Bentuk gelombang I/O
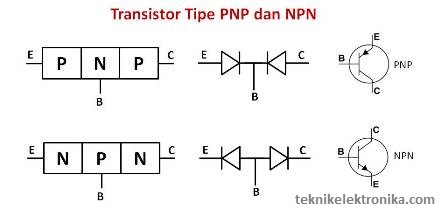
Struktur Dasar Transistor
Pada
dasarnya, Transistor adalah Komponen Elektronika yang terdiri dari 3
Lapisan Semikonduktor dan memiliki 3 Terminal (kaki) yaitu Terminal
Emitor yang disingkat dengan huruf “E”, Terminal Base (Basis) yang
disingkat dengan huruf “B” serta Terminal Collector/Kolektor yang
disingkat dengan huruf “C”. Berdasarkan strukturnya, Transistor
sebenarnya merupakan gabungan dari sambungan 2 dioda. Dari gabungan
tersebut , Transistor kemudian dibagi menjadi 2 tipe yaitu Transistor
tipe NPN dan Transistor tipe PNP yang disebut juga dengan Transistor
Bipolar. Dikatakan Bipolar karena memiliki 2 polaritas dalam membawa
arus listrik.
NPN merupakan singkatan dari Negatif-Positif-Negatif sedangkan PNP adalah singkatan dari Positif-Negatif-Positif.
Berikut
ini adalah gambar tipe Transistor berdasarkan Lapisan Semikonduktor
yang membentuknya beserta simbol Transistor NPN dan PNP.
Simbol Transistor
PRINSIP KERJA TRANSISTOR
Prinsip
kerja transistor PNP adalah arus mengalir dari emitor menuju kolektor.
Dibandingkan NPN, pada PNP terjadi hal sebaliknya ketika arus mengalir
pada kaki basis, maka transistor tidak bekerja. Arus akan mengalir
apabila kaki basis diberi sambungan ke ground (-) hal ini akan
menginduksi arus pada kaki emitor ke kolektor. Jika basis dihubungkan
diberi tegangan maka arus basis harus lebih kecil dari arus yang
mengalir dari emitor ke kolektor. Penggunaan transistor jenis ini mulai
jarang digunakan. Dibanding dengan NPN, transistor jenis PNP mulai sulit
ditemukan dipasaran. Transistor jenis PNP adalah transistor negatif
dimana akan dapat bekerja mengalirkan arus listrik jika basis dialiri
arus negative (-) dan mempunyai lapisan semikonduktor sebagai berikut :
Pada Emitor = Semikonduktor yang dipakai adalah negatif.
Pada Basis = Semikonduktor yang dipakai adalah positif.
Pada Kolektor = Semikonduktor yang dipakai adalah negative.
Prinsip
kerja transistor NPN adalah arus mengalir dari kolektor menuju emitor.
Jika basis dihubungkan diberi tegangan maka arus basis harus lebih kecil
dari arus yang mengalir dari kolektor ke emitor. Untuk mengalirkan arus
tersebut dibutuhkan sambungan ke sumber positif (+) pada kaki basis.
Ketika basis diberi tegangan, hingga dititik saturasi, maka akan
menginduksi arus dari kaki kolektor ke emitor. Dan transistor akan aktif
jika arus yang melalui basis berkurang, maka arus yang mengalir pada
kolektor ke emitor akan berkurang, hingga titik cutoff. Penurunan ini
sangatlah cepat karena perbandingan penguatan yang terjadi antara basis
dan kolektor melebihi 200 kali. Transistor jenis NPN adalah transistor
positif dimana akan dapat bekerja mengalirkan arus listrik jika basis
dialiri arus positf (+) dan mempunyai lapisan semikonduktor sebagai
berikut :
Pada Emitor = Semikonduktor yang dipakai adalah positif.
Pada Basis = Semikonduktor yang dipakai adalah negatif.
Pada Kolektor = Semikonduktor yang dipakai adalah positif
OP-AMP
Penguat
operasional (Operational Amplifier) atau yang biasa
disebut dengan op-amp, merupakan penguat elektronika yang banyak
digunakan untuk membuat rangkaian detektor, komparator, penguat
audio, video, pembangkit sinyal, multivibrator, filter, ADC, DAC,
rangkaian penggerak dan berbagai macam rangkaian analog lainnya.
Op-amp pada umumnya tersedia dalam bentuk rangkaian
terpadu yang memiliki karakteristik mendekati karakteristik penguat
operasional ideal tanpa perlu memperhatikan apa yang terdapat di
dalamnya.
Ada tiga karakteristik utama op-amp ideal, yaitu;
1. Gain sangat besar (AOL >>). Penguatan open loop adalah sangat besar karena
feedback-nya tidak ada atau RF = tak terhingga.
2. Impedansi input sangat besar (Zi >>).
Impedansi input adalah sangat besar sehingga arus input
ke rangkaian dalam op-amp sangat kecil sehingga tegangan
input sepenuhnya dapat dikuatkan.
3. Impedansi output sangat kecil (Zo <<).
Impedansi output adalah sangat kecil sehingga tegangan output
stabil karena tahanan beban lebih besar yang diparalelkan dengan
Zo <<.
Simbol
1. Op Amp Sebagai Penguat Non Inverting
Penguat
Non Inverting adalah suatu rangkaian penguat yang berfungsi menguatkaan
sinyal dan hasil sinyal yang dikuatkan tetap sefasa dengan sinyal
inputannya, hasil dari sinyal input dan output rangkaian non inverting
dapat dilihat pada Gambar 1. Pada dasarnya penguat non inverting
digunakan sebagai pengkondisi sinyal inputan sensor yang terlalu kecil
sehingga dibutuhkan penguatan untuk diproses. intinya penguat non
inverting ke balikkan dari penguat inverting.
Gambar 1 Rangkaian Penguat Non Inverting
Keterangan Gambar
Vin : Tegangan Masukan
Vout : Tegangan Keluaran
Rg : Resistansi ground
Rf : Resistansi feedback
Gambar 2 Sinyal Input dan Output Penguat Non Inverting
Fungsi Penguat Non Inverting Fungsi
dari penguat non inverting kurang lebih sama dengan penguat inverting
hanya saja polaritas output yang dihasilkan sama dengan sinyal inputnya.
Keluaran sensor dan tranduser pada umumnya mempunyai tegangan yang
sangat kecil hingga mikro volt, sehingga diperlukan penguat dengan
impedansi masukan rendah. Rangkaian penguat non inverting akan menerima
arus atau tegangan dari tranduser sangat kecil dan akan membangkitkan
arus atau tegangan yang lebih besar
Rumus Op Amp Non Inverting
Gambar 3 Penjabaran Rangkaian Penguat Non Inverting untuk mempermudah penurunan rumus
Rumus mencari tegangan output yaitu:
Rumus mencari besar penguatannya yaitu sebagai berikut:
Op-amp sebagai voltage follower
Op-Amp Voltage Follower (atau dikenal juga sebagai Unity-gain Amplifier atau Buffer Amplifier) adalah
rangkaian Op-Amp yang memiliki penguatan atau gain (A) tegangan sebesar
1x. Dengan kata lain, Op-Amp tidak memberikan amplifikasi ataupun
atenuasi terhadap sinyal inputnya. Yang artinya keluaran dari Op-Amp
sama dengan masukannya.
Rangkaian Op-Amp Voltage Follower.
Cara Kerja Rangkaian Op-Amp Voltage Follower.
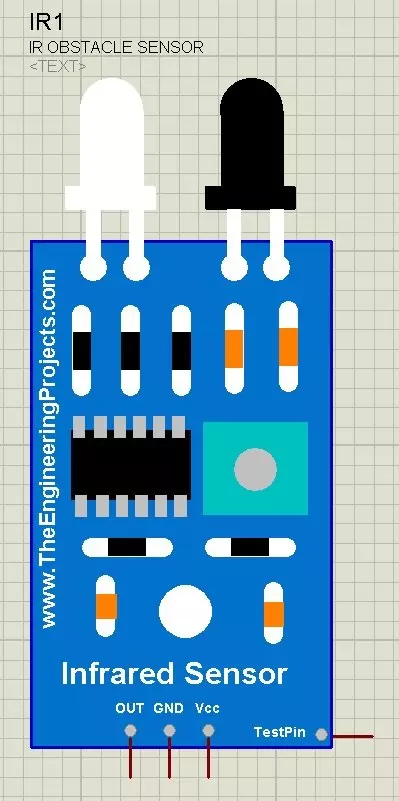
A. Sensor Infrared Proximity
Simbol Ir Proximity Sensor
Infrared Proximity Sensormerupakan
sensor inframerah yang dapat digunakan untuk pedeteksi halangan,
pendeteksi warna (hitam atau putih) pendeteksi gerakan dll. Sensor
infrared ini sangat rentan terhadap cahaya sekitar, penggunaan diluar
ruangan bisa menambahkan penutup pada sensor untuk mengurangi cahaya
yang masuk.
Grafik respon Sensor Jarak :
Cara Kerja
Adapun penjelasan tentang cara kerja proximity adalah sebagai berikut:
Untuk melakukan deteksi pergerakan objek di sekitarnya, ternyata sensor jarak
memanfaatkan adanya radiasi elektromagnetik (medan elektromagnetik).
Dimana sensor jarak tersebut juga mengatur interval nominal agar bisa
melaporkan objek yang terdeteksi.
Jadi,
saat terdapat benda atau objek mendekati sensor maka akan tercipta
sebuah sinyal. Benda atau objek tersebut bisa bersifat logam maupun non
logam. Lalu kemudian signal tersebut akan dihubungkan dengan berbagai
sistem otomatisasi.
Sensor jarak
terdiri dari device elektronik solid state yang tampilannya dalam
kondisi terbungkus. Dengan keadaan terbungkus, maka akan melindungi
perangkat tersebut dari getaran, korosif, ataupun cairan dan kimiawi
yang berlebihan.
Dalam
proses kerjanya, sensor gerak ini dapat diandalkan. Selain nilai
akuratnya yan tinggi, sensor tersebut juga dapat digunakan untuk
mendeteksi benda-benda yang sangat kecil sekalipun.
B. Sensor Touch
Seperti
namanya, Touch Sensor atau Sensor Sentuh adalah sensor elektronik yang
dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi
sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar
sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga
sebagai Sensor Taktil (Tactile Sensor). Seiring dengan perkembangan
teknologi, sensor sentuh ini semakin banyak digunakan dan telah
menggeser peranan sakelar mekanik pada perangkat-perangkat elektronik.
Cara Kerja dan Komponennya
Setelah
memahami Pengertian Sensor Sentuh (Touch Sensor), selanjutnya layar
sentuh bekerja dengan mengombinasikan beberapa komponen utama, yaitu
sensor sentuh, driver perangkat lunak, dan pengendali.
Berikut adalah penjelasan lebih detail mengenai cara kerja dan komponen-komponen tersebut:
1. Sensor Sentuh
(Touch Sensor)
Sensor
sentuh merupakan komponen utama pada layar sentuh yang berfungsi untuk
mendeteksi sentuhan atau tekanan yang diberikan pada permukaan layar.
Sensor ini biasanya terdiri dari beberapa teknologi, seperti resistive,
kapasitif, inframerah, atau ultrasonik.
Sensor
resistive menggunakan lapisan pelindung yang terdiri dari dua lapisan
tipis yang terpisah oleh ruang hampa udara. Ketika layar ditekan, dua
lapisan ini bersentuhan dan mengubah aliran listrik yang membantu
menentukan lokasi sentuhan.
Sensor
kapasitif bekerja dengan mendeteksi perubahan kapasitansi yang terjadi
ketika benda yang memiliki muatan listrik (seperti jari) menyentuh
permukaan layar. Perubahan kapasitansi ini diubah menjadi sinyal yang
menunjukkan posisi sentuhan.
Sensor
inframerah dan ultrasonik menggunakan gelombang inframerah atau
ultrasonik untuk mendeteksi sentuhan. Ketika objek mendekati layar,
gelombang ini terhalang dan menyebabkan perubahan sinyal yang digunakan
untuk menentukan lokasi sentuhan.
2. Driver Perangkat Lunak
Driver
perangkat lunak merupakan perangkat lunak yang memungkinkan komunikasi
antara layar sentuh dan komputer atau perangkat lainnya.
Driver
ini menginterpretasikan sinyal yang diterima dari sensor sentuh dan
menerjemahkannya menjadi perintah atau informasi yang dapat dipahami
oleh sistem operasi (Operating System) dan aplikasi yang berjalan pada
komputer.
Driver ini memastikan bahwa input dari layar sentuh dapat diakui dan digunakan dengan benar oleh perangkat yang terhubung.
3. Pengendali (Controller)
Pengendali atau controller merupakan komponen yang menghubungkan sensor sentuh dengan komputer atau perangkat lainnya.
Pengendali ini bertanggung jawab untuk mengumpulkan data dari sensor sentuh dan mengirimkannya ke driver perangkat lunak.
Pengendali
juga memastikan koneksi yang tepat antara layar sentuh dan perangkat
yang sedang digunakan, baik melalui kabel atau teknologi nirkabel.
Secara
keseluruhan, komponen-komponen ini bekerja secara terkoordinasi untuk
mengenali dan menangkap input sentuhan pada layar, menerjemahkannya
menjadi perintah atau tindakan yang sesuai, dan mengirimkannya ke
perangkat yang terhubung, sehingga pengguna dapat berinteraksi dengan
antarmuka layar sentuh tersebut.
C. Sensor Infrared
(simbol)
Infra
red (IR) detektor atau sensor infra merah adalah komponen elektronika
yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor
infra merah atau detektor infra merah saat ini ada yang dibuat khusus
dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR
Detector Photomodules merupakan sebuah chip detektor inframerah digital
yang di dalamnya terdapat fotodiode dan penguat (amplifier).Bentuk dan Konfigurasi Pin IR Detector Photomodules TSOP. Konfigurasi
pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah
output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima
inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules )
memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip,
keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL
dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC
Semiconductors Optoelectronics Photomodules) adalah penerima inframerah
yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima
langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika
detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin
keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima
frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP)
akan berlogika 1.
Dari grafik dapat disimpilkan bahwa semakin jauh jarak benda maka semakin kecil output nya, dan begitu juga sebaliknya.
Cara Kerja
Konsep dasar dari sensor IR yang digunakan untuk mendeteksi suatu benda
adalah dengan cara mentrasmisikan sinyal infrared (IR trasmiter) kemudian sinyal
inframerah ini dipantulkan oleh permukaan suatu objek dan sinyal diterima oleh
penerima infrared
D. Sensor PIR
Sensor PIR atau Passive Infra Red adalah sensor
yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari
suatu objek. Sensor PIR bersifat pasif, yang berarti sensor ini tidak
memancarkan sinar infra merah melainkan hanya dapat menerima radiasi
sinar infra merah dari luar. Sensor PIR dapat mendeteksi radiasi dari
berbagai objek dan karena semua objek memancarkan energi radiasi,
sebagai contoh ketika terdeteksi sebuah gerakan dari sumber infra merah
dengan suhu tertentu yaitu manusia mencoba melewati sumber infra merah
yang lain misal dinding, maka sensor akan membandingkan pancaran infra
merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan
maka akan terjadi perubahan pembacaan pada sensor.
Sensor PIR
Sensor
PIR merupakan sensor yang dapat mendeteksi pergerakan, dalam hal ini
sensor PIR banyak digunakan untuk mengetahui apakah ada pergerakan
manusia dalam daerah yang mampu dijangkau oleh sensor PIR. Sensor ini
memiliki ukuran yang kecil, murah, hanya membutuhkan daya yang kecil,
dan mudah untuk digunakan. Oleh sebab itu,
sensor ini banyak digunakan pada skala rumah maupun bisnis. Sensor PIR
ini sendiri merupakan kependekan dari “Passive InfraRed” sensor.
Cara Kerja PIR
Pada umumnya sensor PIR dibuat dengan sebuah sensor pyroelectric sensor (seperti
yang terlihat pada gambar di samping) yang dapat mendeteksi tingkat
radiasi infrared. Segala sesuatu mengeluarkan radiasi dalam jumlah
sedikit, tapi semakin panas benda/makhluk tersebut maka tingkat radiasi
yang dikeluarkan akan semakin besar. Sensor ini dibagi menjadi dua
bagian agar dapat mendeteksi pergerakan bukan rata-rata dari
tingkat infrared. Dua bagian ini terhubung satu sama lain sehingga jika
keduanya mendeteksi tingkat infrared yang sama maka kondisinya akan LOW
namun jika kedua bagian ini mendeteksi tingkat infrared yang berbeda
(terdapat pergerakan) maka akan memiliki output HIGH dan LOW secara
bergantian.
Berikut grafik kinerja sensor PIR
Logicstate
Simbol
Logicstate
yaitu pengertian logis, benar atau salah, dari sinyal biner yang
diberikan. Sinyal biner adalah sinyal digital yang hanya memiliki dua
nilai yang valid. Dalam istilah fisik, pengertian logis dari sinyal
biner ditentukan oleh level tegangan atau nilai arus sinyal, dan ini
pada gilirannya ditentukan oleh teknologi perangkat. Dalam sirkuit TTL,
misalnya, keadaan sebenarnya diwakili oleh logika 1, kira-kira sama
dengan +5 volt pada garis sinyal; logika 0 kira-kira 0 volt. Tingkat
tegangan antara 0 dan +5 volt dianggap tidak ditentukan.
Karena
hanya dua status logika, logika 1 dan logika 0, yang dimungkinkan,
teknik aljabar Boolean dapat digunakan untuk menganalisis rangkaian
digital yang melibatkan sinyal biner. Istilah logika positif diterapkan
ke sirkuit di mana logika 1 ditetapkan ke level tegangan yang lebih
tinggi; Dalam rangkaian logika negatif, logika 1 ditunjukkan dengan
level tegangan yang lebih rendah.
LED
Komponen elektronika yang dapat memancarkan cahaya monokromatik
ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang
terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan
oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya.
LED juga dapat memancarkan sinar inframerah yang tidak tampak oleh mata
seperti yang sering kita jumpai pada Remote Control TV ataupun Remote
Control perangkat elektronik lainnya.
Motor DC
Seperti
yang sudah dijelaskan sebelumnya bahwa motor terdiri atas 2 bagian
utama yaitu stator dan motor. Pada stator terdapat lilitan (winding)
atau magnet permanen, sedangkan rotor adalah bagian yang dialiri dengan
sumber arus DC. Arus yang melalui medan magnet inilah yang menyebabkan
rotor dapat berputar. Arah gaya elektromagnet yang ditimbulkan akibat
medan magnet yang dilalui oleh arus dapat ditentukan dengan menggunakan
kaidah tangan kanan.
Kaidah Tangan Kanan
Keuntungan
utama motor DC adalah sebagai pengendali kecepatan, yang tidak
mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan
mengatur:
• Tegangan dinamo : meningkatkan tegangan dinamo akan meningkatkan kecepatan
• Arus medan : menurunkan arus medan akan meningkatkan kecepatan.
Mekanisme Kerja Motor DC:
Mekanisme kerja untuk seluruh jenis motor secara umum sama
Arus listrik dalam medan magnet akan menimbulkan gaya.
·
Jika kawat yang membawa arus dibengkokkan menjadi sebuah
lingkaran/loop, maka kedua sisi loop yaitu pada sudut kanan medan magnet
akan mendapat gaya pada arah yang berlawanan.
· Pasangan gaya menghasilkan torsi untuk memutar kumparan.
·
Motor- motor memiliki beberapa loop pada dinamonya untuk memberikan
tenaga putar yang lebih seragam dari medan magnetnya dihasilkan oleh
susunan elektromagnetik yang disebut kumparan medan
Beberapa kerugian penggunaan motor DC:
-Perawatan intensif karena brush atau sikat pada motor DC akan aus.
-Konversi arus AC menjadi arus DC menggunakan konverter memerlukan biaya yang mahal.
Keuntungan penggunaan motor DC:
-Kecepatannya mudah diatur.
Perhitungan pada motor DC :
Daya input : Pin= √3 Vrms Irms cosƟ
Daya output : Pout= Tout w
w = kecepatan sudut
Tout = torsi output
Efisiensi : η (%) = (Pout/Pin) x 100
Mengapa terdapat efisiensi pada motor? Karena motor yang digunakan
tidak dapat bersifat ideal, artinya pada motor ada kehilangan daya pada
setiap prosesnya sehingga daya output akan bernilai lebih kecil daripada
daya input. Kehilangan daya ini biasa disebut sebagai rugi-rugi daya
dan dapat disebabkan karena mechanical (gesekan dan rotasi) serta
electric (hambatan pada belitan).
Simbol motor listrik
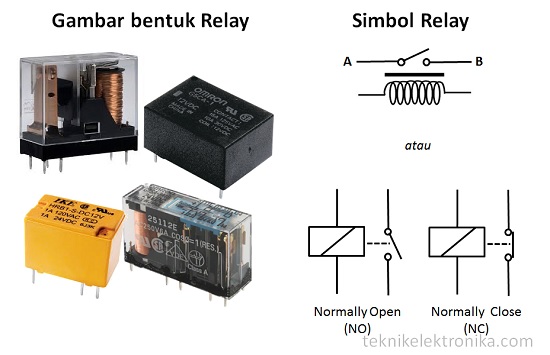
Relay
Relay adalah komponen elektronika berupa sakelar elektronik yang digerakkan oleh arus listrik. Secara prinsip, relay merupakan tuas sakelar dengan lilitan kawat pada batang besi (solenoid) di dekatnya. Ketika solenoid dialiri arus listrik, tuas akan tertarik karena adanya gaya magnet yang terjadi pada solenoid sehingga kontak sakelar akan menutup. Pada saat arus hentikan, gaya magnet akan hilang, tuas akan kembali ke posisi semula dan kontak sakelar kembali terbuka. Relay biasanya digunakan untuk menggerakkan arus / tegangan yang besar (misalnya peralatan listrik 4 A / AC 220 V) dengan memakai arus / tegangan yang kecil (misalnya 0.1 A / 12 Volt DC).
Gambar Bentuk dan Simbol Relay
Fungsi-fungsi dan Aplikasi Relay
Beberapa fungsi Relay yang telah umum diaplikasikan ke dalam peralatan Elektronika di antarannya adalah :
Relay digunakan untuk menjalankan Fungsi Logika (Logic Function).
Relay digunakan untuk memberikan Fungsi penundaan waktu (Time Delay Function).
Relay digunakan untuk mengendalikan Sirkuit Tegangan tinggi dengan bantuan dari Signal Tegangan rendah.
Ada
juga Relay yang berfungsi untuk melindungi Motor ataupun komponen
lainnya dari kelebihan Tegangan ataupun hubung singkat (Short).
Pada rangkaian Smart Bathroom ini menggunakan tiga buah sensor. Untuk
yang pertama itu sensor PIR yang akan diletakkan di atas pintu luar dan
berfungsi sebagai pendeteksi adanya orang yang akan masuk. Jika PIR
sensor mendeteksi adanya orang masuk maka lampu/LED pada ruangan akan
menyala. Untuk selanjutnya jika lampu/LED menyala maka akan dideteksi
oleh LDR Sensor yang akan mengaktifkan motor untuk menyiram kloset.
Kemudian jika ingin menghidupkan kran pada kloset apabila terdapat
tangan yang dideteksi oleh sensor ultrasonik, maka output dari sensor
ultrasonik yaitu motor akan membuka kran air pada bak mandi kamar mandi.
d. Flowchart dan Listing Program
Flowchart
Listing Program
#include<Wire.h>
#include<LiquidCrystal_I2C.h>
#include<Servo.h>
Servo myServo1;
Servo myServo2;
Servo myServo3;
int sPIR = 10;
int sInfra = 11;
int sTouch = 12;
int oMotor = 4;
int oLamp = 8;
LiquidCrystal_I2C lcd(0x27, 20, 4);
voidsetup(){
// put your setup code here, to run once:
pinMode(sPIR, INPUT);
pinMode(sInfra, INPUT);
pinMode(sTouch, INPUT);
pinMode(oMotor, OUTPUT);
pinMode(oLamp, OUTPUT);
myServo1.attach(2);
myServo2.attach(7);
myServo3.attach(13);
lcd.begin();
}
voidloop(){
// put your main code here, to run repeatedly:
int a = digitalRead(sPIR);
int b = digitalRead(sInfra);
int c = digitalRead(sTouch);
int sJarak = analogRead(A0);
int sSuhu = analogRead(A1);
float sAmonia = analogRead(A2);
float x = (sAmonia / 1023) * 100;
//Sensor Amonia
if(x <= 2.5){
lcd.setCursor(0, 0);
lcd.print(x);
lcd.setCursor(0, 1);
lcd.print("Urine Tidak Normal ");
lcd.setCursor(0, 2);
lcd.print("(Potensi Kerusakan");
lcd.setCursor(0, 3);
lcd.print("Ginjal)");
}elseif(x > 2.5 && x < 4.5){
lcd.setCursor(0, 0);
lcd.print(x);
lcd.setCursor(0, 1);
lcd.print("Urine Normal ");
lcd.setCursor(0, 2);
lcd.print(" ");
lcd.setCursor(0, 3);
lcd.print(" ");
}else{
lcd.setCursor(0, 0);
lcd.print(x);
lcd.setCursor(0, 1);
lcd.print("Urine Tidak Normal ");
lcd.setCursor(0, 2);
lcd.print("(Dehidrasi) ");
lcd.setCursor(0, 3);
lcd.print(" ");
}
//Sensor Jarak
if(sJarak < 193){
myServo1.write(0);
}else{
myServo1.write(0);
myServo1.write(90);
}
//Sensor Suhu
if(sSuhu > 52){
digitalWrite(oMotor, HIGH);
delay(100);
}else{
digitalWrite(oMotor, LOW);
delay(100);
}
// Sensor PIR
if( a == HIGH){
digitalWrite(oLamp, HIGH);
}else{
digitalWrite(oLamp, LOW);
}
//Sensor Infrared
if( b == HIGH){
myServo2.write(0);
}else{
myServo2.write(0);
myServo2.write(90);
}
//Sensor PIR
if( c == HIGH){
myServo3.write(0);
}else{
myServo3.write(0);
myServo3.write(90);
}
}
Penjelasan:
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Servo.h>
Servo myServo1;
Servo myServo2;
Servo myServo3;
int sPIR = 10;
int sInfra = 11;
int sTouch = 12;
int oMotor = 4;
int oLamp = 8;
LiquidCrystal_I2C lcd(0x27, 20, 4);
Include Libraries:
#include <Wire.h>: Mengimpor library untuk komunikasi I2C.
#include <LiquidCrystal_I2C.h>: Mengimpor library untuk menggunakan tampilan LCD berbasis I2C.
#include <Servo.h>: Library ini memungkinkan pengendalian servo motor.
Servo Objects dan Penetapan Pin:
Servo myServo1;, Servo myServo2;, Servo myServo3;: Deklarasi tiga objek Servo.
int sPIR = 10;, int sInfra = 11;, int sTouch = 12;: Penetapan pin untuk berbagai sensor (PIR sensor, Infrared sensor, Touch sensor).
int oMotor = 4;, int oLamp = 8;: Penetapan pin untuk perangkat keluaran (Motor dan Lampu).
Inisialisasi LCD:
LiquidCrystal_I2C lcd(0x27, 20, 4);: Inisialisasi objek LiquidCrystal_I2C dengan alamat I2C 0x27, dan dimensi LCD 20x4.
void setup() {
// put your setup code here, to run once:
pinMode(sPIR, INPUT);
pinMode(sInfra, INPUT);
pinMode(sTouch, INPUT);
pinMode(oMotor, OUTPUT);
pinMode(oLamp, OUTPUT);
myServo1.attach(2);
myServo2.attach(7);
myServo3.attach(13);
lcd.begin();
}
Fungsi Setup:
pinMode(...): Mengonfigurasi pin yang ditentukan untuk berperilaku sebagai input atau output.
myServo1.attach(2);, myServo2.attach(7);, myServo3.attach(13);: Melampirkan servo motor ke pin yang sesuai.
lcd.begin();: Memulai LCD.
void loop() {
// put your main code here, to run repeatedly:
int a = digitalRead(sPIR);
int b = digitalRead(sInfra);
int c = digitalRead(sTouch);
int sJarak = analogRead(A0);
int sSuhu = analogRead(A1);
float sAmonia = analogRead(A2);
float x = (sAmonia / 1023) * 100;
Fungsi Loop:
digitalRead(...): Membaca status pin input digital (HIGH atau LOW).
analogRead(...): Membaca nilai dari pin analog yang ditentukan.
Perhitungan nilai persentase x berdasarkan pembacaan analog dari sensor amonia.
//Sensor Amonia
if (x <= 2.5) {
// Menampilkan di LCD untuk kadar amonia rendah
} else if (x > 2.5 && x < 4.5) {
// Menampilkan di LCD untuk kadar amonia normal
} else {
// Menampilkan di LCD untuk kadar amonia tinggi
}
Kondisional Sensor Amonia:
Tampilan LCD yang berbeda ditetapkan berdasarkan tingkat amonia.
//Sensor Jarak
if (sJarak < 193) {
myServo1.write(0);
} else {
myServo1.write(0);
myServo1.write(90);
}
Kontrol Sensor Jarak:
Jika pembacaan jarak kurang dari 193, servo pertama diatur ke 0 derajat; jika tidak, diatur ke 90 derajat.
//Sensor Suhu
if (sSuhu > 52) {
digitalWrite(oMotor, HIGH);
delay(100);
} else {
digitalWrite(oMotor, LOW);
delay(100);
}
Kontrol Sensor Suhu:
Jika pembacaan suhu lebih dari 52, motor dihidupkan; jika tidak, dimatikan.
// Sensor PIR
if (a == HIGH) {
digitalWrite(oLamp, HIGH);
} else {
digitalWrite(oLamp, LOW);
}
Kontrol Sensor PIR:
Jika sensor PIR mendeteksi gerakan (HIGH), lampu dihidupkan; jika tidak, dimatikan.
 Voltmeter adalah alat ukur yang digunakan untuk mengukur beda potensial atau tegangan listrik dari dua titik potensial listrik.
Voltmeter adalah alat ukur yang digunakan untuk mengukur beda potensial atau tegangan listrik dari dua titik potensial listrik.
.png) Pinout :
Pinout : .png)
.png)

.png)
.jpeg) Spesifikasi :
Spesifikasi :.png)

.png)

.png)
.png)
.jpeg) Grafik Sensor IR Proximity
Grafik Sensor IR Proximity
.jpeg)



.jpeg)

.png)
.jpeg) Grafik responsi sensor :
Grafik responsi sensor :





 Konfigurasi Pin
Konfigurasi Pin
.jpeg)



.png)
.png)
.png)
.png)
.jpeg)
.png)
.png)
.png)
.png)
.jpeg)

.jpeg)
.jpeg)
.png)
.jpeg)






.jpeg)









 Rumus Dioda zener
Rumus Dioda zener


.png)
.png)
.png)








.png)

![[IR_proximity_sensor.jpg]](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhaj_525f6xsMPNeokDfeNaF6GFveRw7kHh6K7ZBua6rPcuwmd7g1xt9vF7xcFgQmBAmaNXeyi79f0UgVLFfEwkKwZVAuXGx6khPzJ6VUoPg7mQgew7RSTY3pplcZ7A-JIvy_ufc_c6hfrp/s252/infrared.png)








.png)




Tidak ada komentar:
Posting Komentar